11th of March 2020
Disclaimer!
Due to the COVID-19 Pandemic, we are no longer able to continue with this project. I have thoroughly enjoyed working on this project with my team mates Nathan and Nader. We had our struggles together with our robot malfunctioning, the chassis not being up to par, and replacements of parts but had many success with codes working as they should, the parts working separately and together, and also learning a lot during this journey. We had strong motivation to improve our robot as much as we could and learning from our mistakes but unfortunately that’s not possible at the moment.
Intro
This week, my team and I decided to start fresh. We decided to come up with a brand new design and building it using laser cutting. This decision was made as we thought that the dimensions would be more exact which would decrease the risk of exceeding the measurement limit.
Nathan is responsible for the making of the chassis material now and Nader and I are working on reprogramming our robot.
Design
I also decided to come up with a design which was approved by my team. The idea I thought would work well was for our robot to have a low centre of gravity with a wide and steady base. This so that our robot will have no way of being tipped over whilst also being much faster.
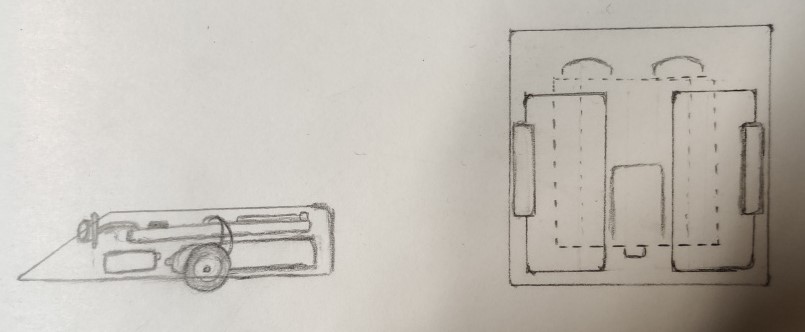
Nathan is planning to properly sketch the design in autocad and then later convert it to a 3D printable file. This will be 3D printed as the material is lighter which would be beneficial to our weight limit. We also didn’t want the robot to be too light so we are also thinking of adding metal fastenings to add weight to our robot which would aid it in pushing out other robots from the table.
IR Sensor
Below is a completed IR sensor. This will be used to prevent our robot from falling off the RoboSumo table where our robots will be placed to battle one another. The table is black and circular with a white outer rim. When the sensor detects the white rim, the robot will reverse.
While Nader and I worked on planning, Nathan decided to take a look at the IR Sensor, assemble, and solder it. The components given are a TCRT5000 IR reflective sensor, a 10kΩ and 220Ω resistor, and 1 DIT_RS_CS5 PCB.
A guide on how to construct the sensor can be found on https://robosumo.wordpress.com/2019/10/09/assembly-instructions-for-tcrt5000-printed-circuit-board/ . As we would have used two of these sensors, I would have to find a way to add them to the design without exceeding the measurement limit.

Here are some of the components Nader has purchased for our robot.

Roles during the Project
- Nathan: Program, CAD, hardware
- Nader: Hardware, program
- Andrea: Design, program, organising
